Operating envelope
Sundog Balance
Recovers inside the lighting envelope; fails cleanly at the shadow boundary.
Open workbench ->Research lab for traceable projections
Read the shadow. Test the boundary.
Solar halos are the front door: visible projections of hidden geometry. Sundog carries that discipline into control, agents, and AI traceability: publish the trace, publish the boundary. The hard cases — open-problem framings in PDE, gauge theory, and combinatorics — are written up and sent to domain experts for sanity checks, with every verdict logged in the open.
Forward geometry sketch: parhelion offset is the promoted inverse handle; CZA and tangent arcs stay boundary-gated.
Elevator Pitch Living draft · v1.3 · 2026-06-02 · audit-hedged

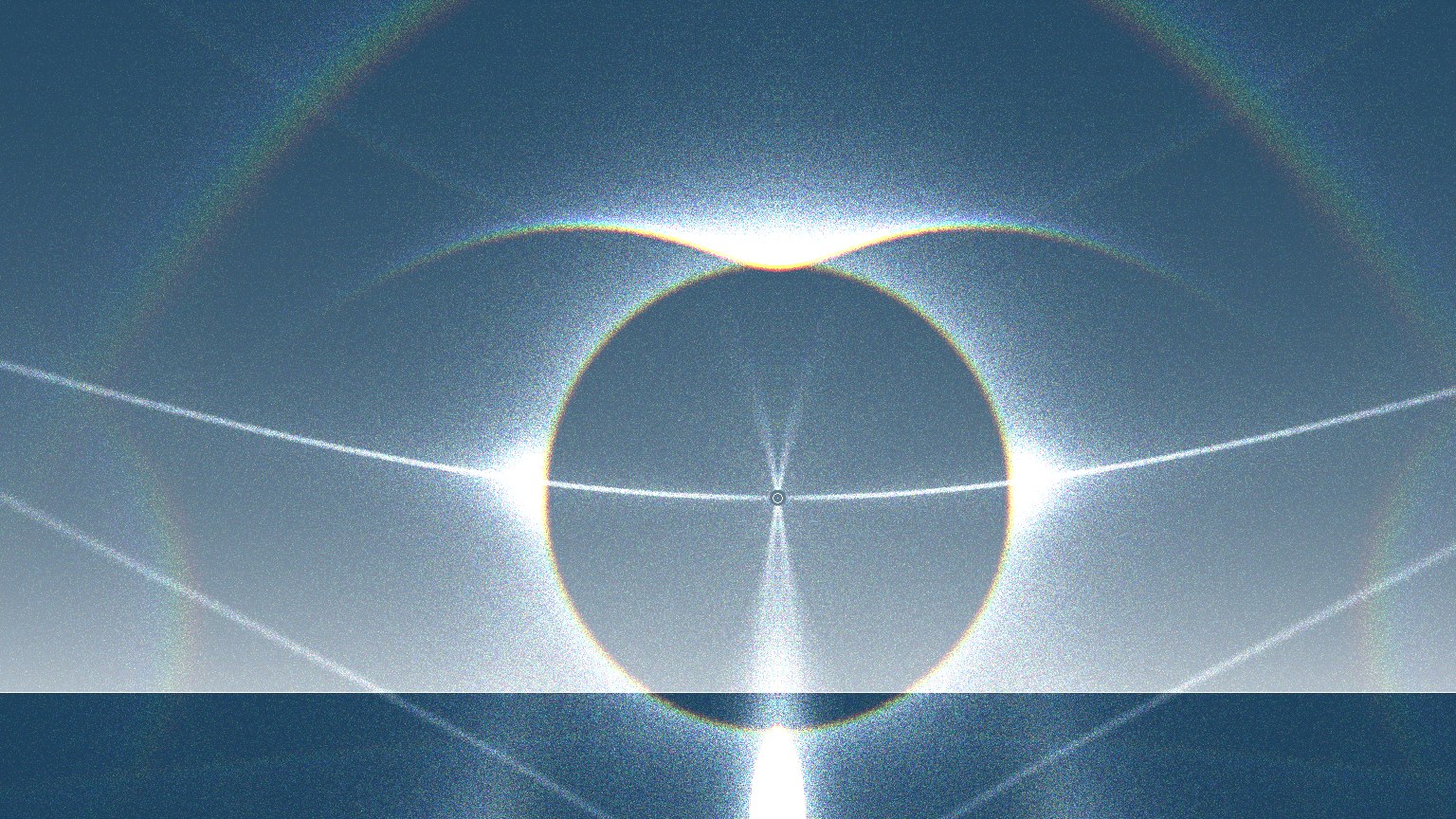
A sundog is a good first picture because the sky makes the idea visible. Ice crystals near the sun throw a partial pattern into view: a 22° ring, parhelia, tangent arcs, and other fragments of a larger geometry. You do not see every crystal or every ray. You see a readable projection of the hidden setup. The trick is not to treat the projection as magic, or as the whole truth; it is to ask what hidden state it reliably lets you infer.
Sundog asks whether that move generalizes: when the full system is too large, too hidden, or too expensive to inspect directly, can a smaller shadow carry enough structure to act from? In the mesa work, the hidden body is a trained policy network under selection pressure; the readable shadow is an entangled 5-dimensional subspace at net.7. In the three-body workbench, the body is the full simulated state; the shadow that survives the mechanism audit is simpler than expected: radius gates an inward reflex inside a mapped near-escape pocket. In the chat experiment, the body is the model’s whole answer process; the shadow is a trace packet that says what claim class, source, boundary, and refusal rule the answer must preserve.
The precise word for this is projection: a lower-dimensional readout of a larger object. The plain-English image is body and shadow. The shadow has less information than the body, but sometimes it is more rigid, more testable, and more useful. That is the common shape across the solar halo, cap-set and unit-distance explainers, mesa activations, three-body control, and Ask Sundog’s visible trace. The live claim is still bounded: each projection has its own failure mode, and the geometry side of the crossover remains audit-hedged while the re-derivation work clears. The point is not “one weird trick works everywhere.” The point is: publish the projection, publish where it breaks, and do not upgrade the claim past the test.
The future-facing hypothesis is accountability through traceable projections: AI systems should expose enough provenance, uncertainty, refusal, and audit trail that outside people can reconstruct what was claimed, sourced, refused, or escalated. That does not certify a system as safe, conscious, or aligned. It makes the system more evaluable. Sundog’s bridge from the solar hologram to safer AI is this posture: act from indirect traces when direct sight is unavailable, then make the trace visible enough that others can challenge it.
We hold ourselves to the same posture. Where a projection touches a hard, well-studied problem, the framing is written into a reviewer packet and put in front of a domain expert — not to claim a result, but to ask “is this fenced from overclaim, or is it just ordinary X?” A negative reply is the most useful outcome. Count it up yourself: the review tracker lists every open packet and verdict — finite-Galerkin Navier–Stokes C1, Yang–Mills (sent), Kakeya, Hodge, and the resolved-in-house Riemann null. Each packet states its own scope clauses and what would falsify it.
The moving scene above is a forward-geometry sketch, not a calibration receipt. It uses the current Phase 3 bindings where they are load-bearing: parhelion offset follows sun altitude, the CZA disappears at its coded cutoff, and tangent arcs stop at the circumscribed merge. The cards separate optics, physics, and application meaning so the picture does not overclaim.
The inner ring is the ruler. By itself it is not a hidden-state proof and it does not recover sun altitude. It fixes the scale that lets every other feature be tested against a common geometry.
The side glints are the only promoted image-recoverable inverse handle after the geometry audit. As sun altitude changes, their distance from the sun changes by the closed form. That is why the hero moves the parhelia, not the claim boundary.
The high smile is useful vocabulary, but it is not currently a promoted route for recovering altitude from public photos. The important behavior is the boundary: when the coded geometry says the CZA exits the visible regime, the hero lets it disappear.
The upper tangent arc is allowed as logo and animation vocabulary, but not as an altitude inverse. The current model is single-cell calibrated and guarded at the 29 degree merge, so the animation treats disappearance as part of the physics.
This is the structural-failure lesson: a trustworthy indirect route should fail where the closed form becomes ill-posed. The hero therefore shows the limits as behavior, not as a footnote.
The atmospheric sketch is not the whole lab. It is the visual grammar for the apparatus: separate hidden state, indirect trace, transformation, action, and the place where the coupling stops working. The photometric result and the operating-envelope workbenches carry that discipline into control systems.
Evidence lives here. Eight load-bearing pillars keep the public claim inspectable — machine-checked Lean method cores (six examples, referee-free), the first equation, a structural falsifier, a mesa operating envelope, the K_facet v0.3h audit-chain receipt, the Shadow Faraday zero-out, the Navier-Stokes C1 Reading-2 witness (review-gated), and a proof-trunk status gate — and beneath them, two core photometric result metrics anchor the original mirror-alignment finding. They are supports for the apparatus, not a universal theorem claim.
The public Lean repo now carries fifteen machine-checked deductive cores + one synthesis law + one constructive universal-approximation capstone. The original ten cover finite-field, real analysis × 2, halo, Aharonov-Bohm, Karp 3SAT→decoding, audit game with ∀-verifier blindness, the tropical/PL core with linear gate count ≤ 4N via a sharing-aware DAG (compileToDag) — the ε=0 PL core for arXiv:2606.26705 Thm 3.2 / Cor 5.1 — the N-1 monotone depth-as-computation theorem, and the find/check ledger (one Certifies interface, seven cheap-CHECK instances: max-flow/min-cut, König, 2-SAT, Pratt, shortest-path, syndrome, ReLU gate-count). The slate-3 five extend into the ε > 0 analytic side: cpl_iff_reluNet (continuous-PL ↔ ReLU, both directions), AnalyticGate + SawtoothApprox (x2 at O(1/√ε) elementary and O(log 1/ε) polylog depth), QueryGap check_lt_find (the ledger's first proved find/check gap in a restricted query model — not a P-vs-NP claim), GradedCancellation (region count ≤ 4g·leafCount, monotone-vs-general as a graded dial), and an empirical sample-complexity result (ε-essential predicts data needs, Spearman 0.68/0.78). Alongside, one synthesis law: the Order-Relative Resolution Law (OrderRelative) proves Resolves k t ↔ ord t ≤ k once as a schema, grounded on eight instance families (parity-determination, coordinate-locality, search-reachability, radical-reach, spectral/moment, algebraic-degree, cohomological torsion-vs-free, surface-window counts-vs-order), guarded by order_is_schema_not_scalar against universal-scalar misread, and now equipped with a composition law proved as a single general lemma (orderOf_prod_eq_lcm) — the group-order axes fall out as instances (cohomological_compose, radical_compose), not seven separate proofs — with compose_lcm_not_max (4⊕6=12, not 6) and converse_fails proving both walls; a structure theorem (structure_mode_vector) proving the difficulty vector is a group's invariant-factor vector and the scalar is its join; and an approximation dimension (OrderRelativeApprox / …Graded / …LadderK) proving approximation to any tolerance always works but exact representation is order-relative — an unbounded ladder against a hard resist pole. The newest axis is the surface-window pair (SurfaceBag / SurfaceBagGraded): over bracket strings the order-blind count vector determines nesting depth (bagSufficient_depth) yet can never determine the stack-top — two prefixes ([ and [( share every count and disagree on the state — and the resistance holds at every window order (σsurface = ∞, stackTop_resists_every_window), the pair axiom-lean at propext + Quot.sound with no choice axiom; its boundary is measured, not guessed — on real code a small pretrained model reads the stack-top in its residual stream at 0.931 exactly where the count statistic collapses to 0.770 (gated on matched baselines: probe suite, random-init twin, order-shuffle), while the high-dimensional (≥ 20-axis, natural-data) version was run to a pre-registered negative across six label families and two model scales. Composition is axis-internal, applying where the structure is a group order; the last analysis step (independent-sum integrability) is now Lean-checked too (indepFun_integrable_add_iff) — no prose fences remain. Above it all, the capstone: UniversalApprox.continuous_relu_approximable — every continuous function on [0,1] is uniformly ε-approximable by an explicit ReLU net, proved end-to-end through the analytic-gate chain (MultiplyGate → MonomialEval → PolyEval → the capstone), axiom-clean, with only Stone-Weierstrass density imported. Lean certifies the cores only; the analytic floor (Stone-Weierstrass density), decoding hardness, NP-class / Cook-Levin wrapping, model realization, physical optics, the physical gauge field, the depth-vs-width lower bound for general nets (Telgarsky / Eldan–Shamir), and the find-side of every certifying instance all stay named walls. Not a hardness claim, not P-versus-NP (the QueryGap proved separator lives in a restricted query model), not a learnability claim, not a new approximation theorem, not a rate improvement (the capstone is the constructive direction of a classical Yarotsky-style fact), not a fast primality test (Pratt is NP-membership), not a general neural-net lower bound, not a universal-cross-instance-scalar claim, not a world-model or “understanding” claim (the surface-window crossover's empirical half is a low-dimensional existence result — one three-valued state on ambiguous positions of real code — claimed only relative to its matched baselines), and not a halo-physics, Aharonov-Bohm, or audit-coverage claim.
Parhelion offset gives sun altitude through the promoted inverse — with the eligibility boundary visible. Plainly: it is like reading time from a shadow, but only after proving the shadow comes from the right kind of clock.
Pre-registered five-locus falsifier. Like inspecting a bridge at named stress points before calling it safe, the map shows which breaks were tested, which held, and which remain open.
In-vitro operating envelope: 22 audited policy cells, sharp cliff at λ ≈ 0.953. In lay terms, it is a warning dial: the policy behaves inside the tested green range and breaks past the marked edge.
20 of 21 strict G.2 single-curve choreographies returned structural-zero receipts; O_617 was quarantined for a bridge direction outside the valid D₃ representation. Think of it as sorting beads on a wire: one bead did not belong on the same wire, so it is named instead of hidden. The wider v0.3-v0.12 isotrophy program now says velocity-fraction stratifies piano-trio stability inside fixed mass-ratio strata, while failing as a mass-marginal held-out predictor — and v0.12 found that conditional signal does not yet transfer to an external catalog (blocked by numerical feasibility, not falsified).
Local plaquette-holonomy shadows recover Faraday induction on the registered classical-vacuum domain (Branch A). The boundary audit then turned up the headline: an Aharonov–Bohm case where the local field reads nothing, yet a loop around it reads the hidden flux exactly — the portfolio's one exact “decide without reconstructing” witness. Phase 8 closes the Maxwell arc and shows it adds no new one.
Click any cell to open its phase document. Like a construction checklist, the trunk shows which proof pieces are locked in, which are gated, and which are not yet public evidence.
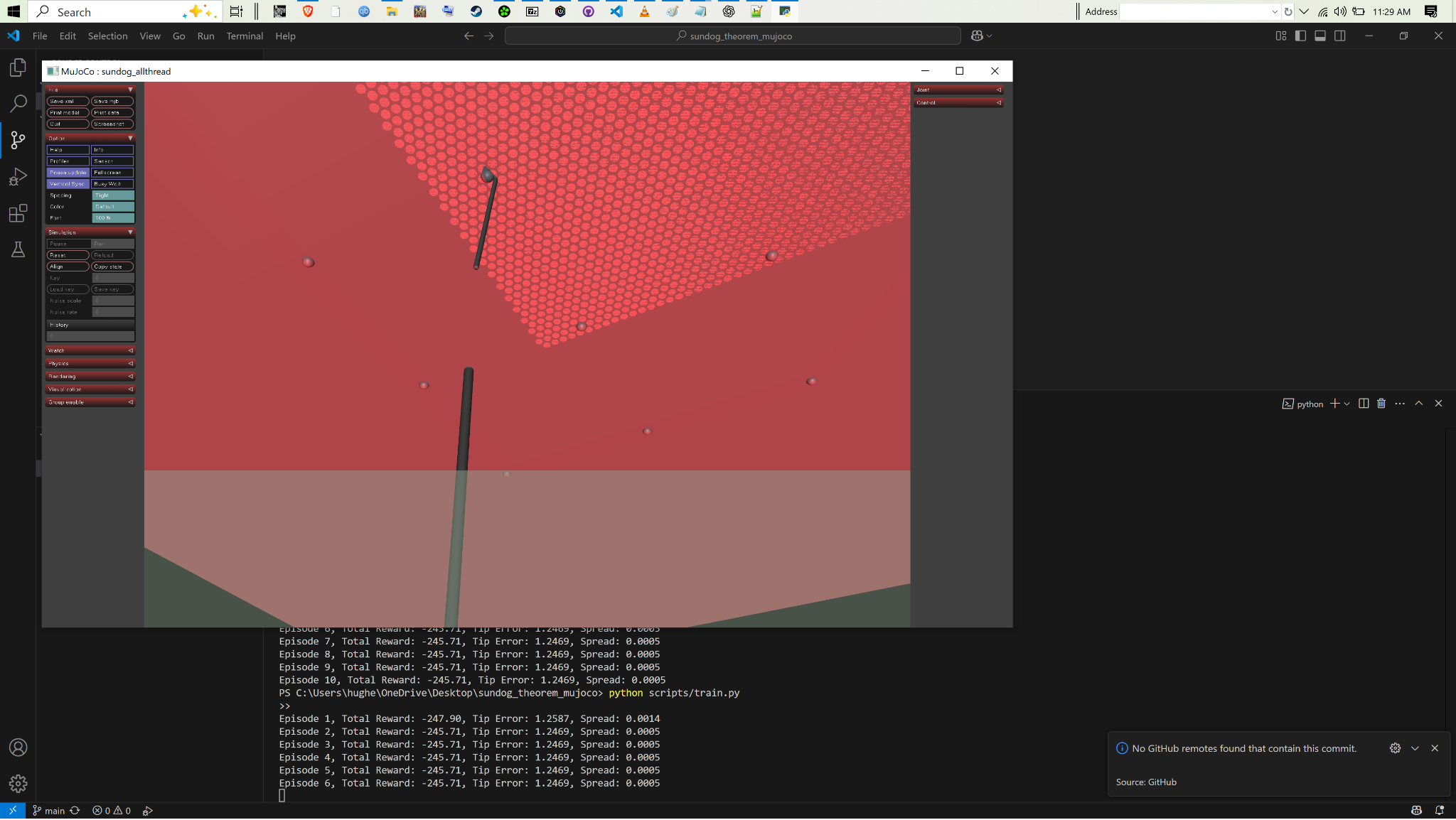
A 2-DoF pole steers a mirror that bounces a ceiling laser onto one of eight floor detectors. The controller sees only the eight intensities and its own joints — never where the target is. On 30 matched MuJoCo scenes it still locks onto target detector D₀.
Same terminal accuracy as the controller that knows where the target is — paid for with about 16× longer convergence. Random never converges; tight joint limits below 1.2 rad break the controller. The boundary is named.
Application Rail
Application previews live here; evidence weight lives in the ledger above. Each card points to a working surface, product expression, or bounded workbench with its own tier and inspection path.
Recovers inside the lighting envelope; fails cleanly at the shadow boundary.
Open workbench ->Guarded local signals survive the near-escape pocket, not the whole cosmos.
Open workbench ->No target coordinates; just detector response, motion, and a closed loop.
Read result ->A noisy pressure field buys more safe progress before failure inside a narrow mapped pocket.
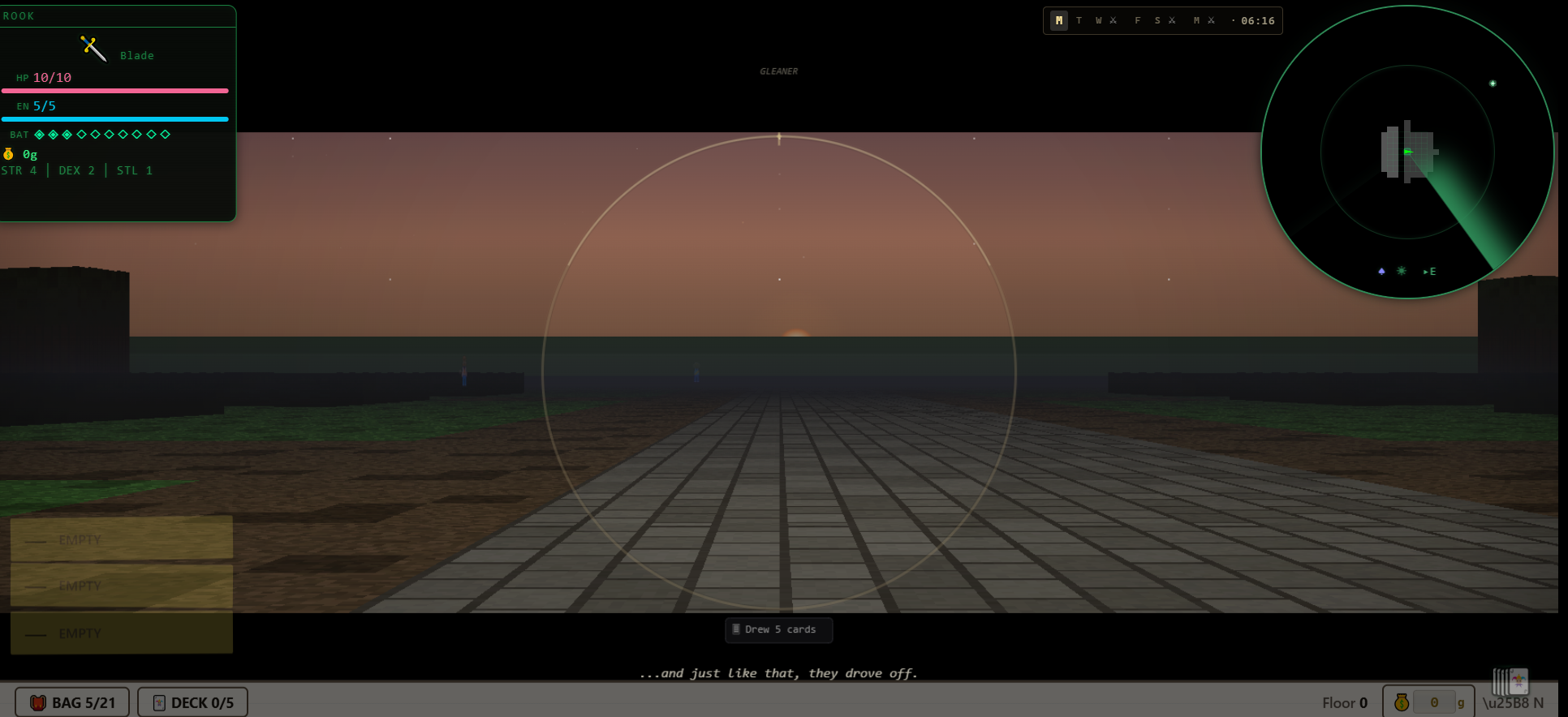
Open workbench ->Roguelike agents acting from compressed perception instead of full sight.
View case ->NPC motion pulled by verbs and needs, not just shortest-path errands.
View case ->Softbody terrain reads through graph signatures, recovery, and strain.
View case ->The 2016 polynomial-method precedent for OpenAI's 2026 unit-distance disproof, hands-on.
Open workbench ->See every working system, with its evidence tier →

Small Signal, Larger World
Sundog keeps returning to the same posture: an indirect signal is not a leftover if you can name what made it, how it was transformed, and where the inference stops. A drop can hold a forest; a halo can hold geometry; a trace can hold enough structure to act carefully.
Choose the inspection path
View the repository
Read the docs
Read the comparator ledger
Inspect the falsifier
Trace the physical discovery
Inspect working systems
Watch demos
Get involved
Join the community